Description
The camera calibration tool lets you calibrate any video camera very accurately
and in few seconds.
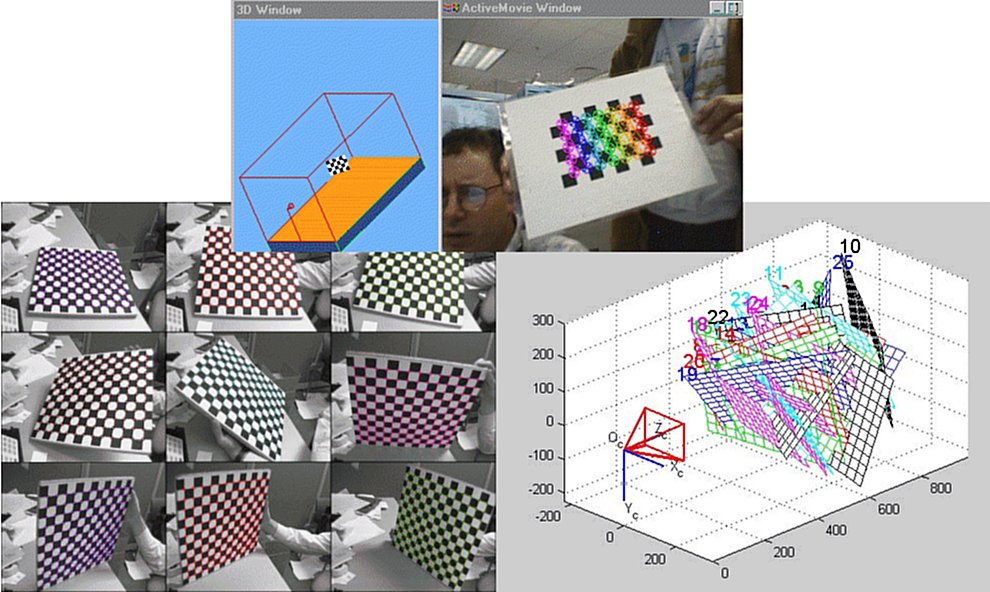
The user presents a flat checkerboard pattern in front of the camera,
and the program automatically acquires a number of images and uses them
to compute the intrinsic camera parameters (focal length, principal point,
distortion coefficients) as well as the extrinsic parameters (3D position
of the pattern for each image).
Since the corners of the pattern are located automatically on each image,
the entire procedure is fully automatic. Once calibration is done, the
program lets you undistort the video images in real time (at frame rate).
The lens distortion model consists of two terms: a radial distortion term
(up to the fourth order) and a tangential distortion term (two scalars
for encoding the angular orientation of the focal plane with respect to
the sensor plane). Consequently, the lens distortion model is parameterized
using four scalar coefficients.
A complete tutorial of the algorithm with matlab code is provided, see
Tutorial Section below.
DirectShow Filter Application
Note that this filter requires that you have DirectShow 6.0 or greater installed
with graphedt.exe (DirectShow 6.0 for NT4.0, DirectShow 7.0 for
Win 98 or Win2000)
(http://www.microsoft.com/downloads/release.asp?ReleaseID=16927 ~128MB[!]).
You will also need a video camera source filter which should
be supplied by your USB camera vendor.
Microsoft* Windows* 2000 may be the most suitable operating system
for development since many vendors do not supply filters for
Windows NT 4.0. However, Windows 98 will be adequate for just
running the filter graph
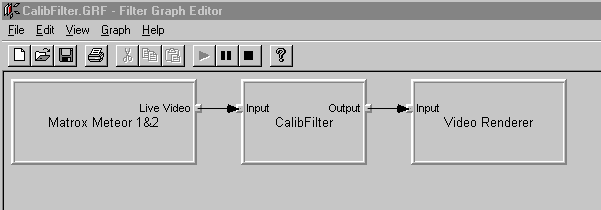
An example filter graph is shown below. It is running our own
calibration filter that processes a video source from a Matrox
Meteor II card and then passes the output to a video renderer.
Right clicking on the CalibFilter brings up its property control page
as follows:
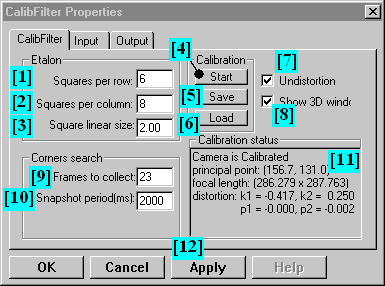
Controls
[1] Enter the
number of columns (Squares per row)in your calibration checkerboard.
Click "Apply" [12] to enter.
[2] Enter the
number of rows (Squares per column)in your calibration checkerboard.
Click "Apply" [12] to enter.
[3] Actual
size of squares in your calibration checkerboard (in whatever units --
say cm). Click "Apply" [12] to enter.
[4] Start automatic
collection of calibration frames.
[5] Save current
set of calibration parameters to disk.
[6] Load previously
saved calibration parameters.
[7] If you've
just calibrated the camera, or have loaded [6] previous calibration parameters,
checking this box causes the computation of the undistorted image in real
time. If this box is not checked, the raw video frames are displayed.
You must click "Apply" [12] to register the check.
[8] Checking
this box causes an OpenGL display to show the tracking of the calibration
checkerboard. You must click "Apply" [12] to register the check.
[9] Set how
many frames of the calibration checkerboard you want to collect before
performing calibration (between 10 and 20 is usually enough, use more only
if high accuracy is desired). Click "Apply" [12] to enter.
[10] Set how
number of miliseconds of delay between collecting frames of the calibration
checkerboard when you start [4] calibration. This allows you as much
time as desired to move the calibration checkerboard around the video scene
before the next frame is taken during calibration. Click "Apply"
[12] to enter.
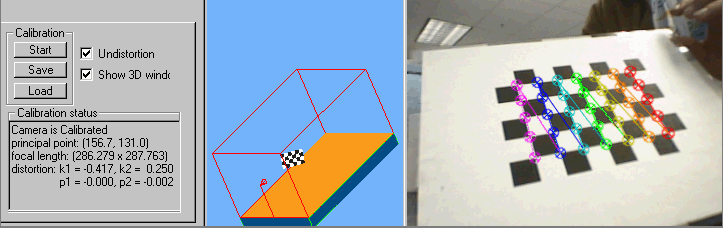
[11] The current
calibration parameters are displayed in this box.
[12] You must
click "Apply" after setting any or all of [1], [2], [3], [9] and/or [10].
How To...
Calibrate a camera
(a) Get or make a black and white checkerboard calibration object
as shown in the images above or animated gif's below.
(b) Enter the number of columns ("squares per row") in [1] and
number of rows (squares per column) in [2]; Enter the size of a square
in whatever units in [3] (optional) ; Enter the number of frames that you
want to collect in [9] (10-20 usually suffices); Enter the minimum time
between capturing frames to allow you time to move the calibration object.
(c) Click "Apply" [12].
(d) Click "Start" [4].
(e) Move the checkerboard around. The number of frames
collected will display in [11]. When all frames are collected it will solve
for the calibration parameters and display them in [11].
(f) Checking [7] followed by clicking "Apply" [12] causes the
rectified video image to be displayed as shown in the second example below.
Notes: When calibrating, the video image flashes when a frame is captured.
It won't capture unless the colored lines are drawn on the checkerboard
as shown in the examples below. You must move the calibration object
around -- if your views are too much alike, you will get an ill-conditioned
matrix with resultant divide by zero when the filter solves for the camera
calibration parameters.
Save calibration parameters to a file:
(a) Click "Save" [5] and a dialog box will prompt you for
saving the calibration parameters under a text file. Click this
link for information on the camera model, and the content of the text file.
Load previously stored calibration parameters:
(a) Click "Load" [6] and a dialog box will allow you to select
a calibration parameter file.
(b) Calibration parameters will appear in [11].
Turn image rectification on and off:
(a) On: Check the "Undistortion" box [7]. Click "Apply" [12].
(b) Off: Un-check the "Undistortion" box [7]. Click "Apply"
[12].
Turn the 3D OpenGL window on and off:
(a) On: Check the "Show 3D window" box [8]. Click "Apply" [12].
(b) Off: Un-check the "Show 3D window" box [8]. Click
"Apply" [12].
Examples
The following movie shows the 3D pose of the calibration object being computed
in real time after the camera has been calibrated.
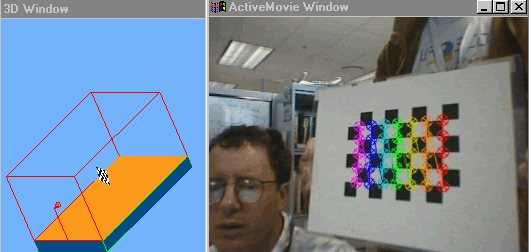
The next picture shows image undistortion performed by the filter.
Tutorial and calibration toolbox
In addition to the
OpenCV implementation of the calibration functions and tool, we provide a complete
tutorial and calibration toolbox for MATLAB. It can be downloaded from
OpenCV page at Source Forge